Feature Point Based Robust Three-Dimensional Rigid Body Registration
Abstract
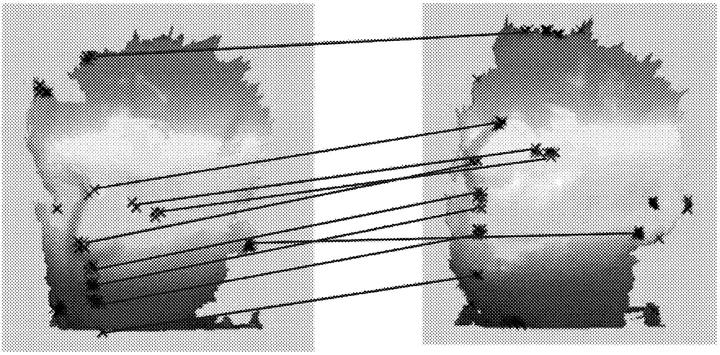
A method and system for registration of three-dimensional (3D) image frames is disclosed. The method includes receiving two point clouds representing two 3D image frames obtained at two time instances; locating the origins for the two point clouds; constructing two 2D grids for representing the two point clouds, wherein each 2D grid is constructed based on spherical representation of its corresponding point cloud and origin; identifying two sets of feature points based on the two 2D grids constructed; establishing a correspondence between the first set of feature points and the second set of feature points based on a neighborhood radius threshold; and determining an orthogonal transformation between the first 3D image frame and the second 3D image frame based on the correspondence between the first set of feature points and the second set of feature points.
Aleksandr Petiushko Александр Петюшко
Director, Head of ML Research / Adjunct Professor / PhD
Principal R&D Researcher (15+ years of experience), R&D Technical Leader (10+ years of experience), and R&D Manager (7+ years of experience). Running and managing industrial research and academic collaboration (35+ publications, 30+ patents). Inspired by theoretical computer science and how it changes the world.