CIMRL: Combining IMitation and Reinforcement Learning for Safe Autonomous Driving
Abstract
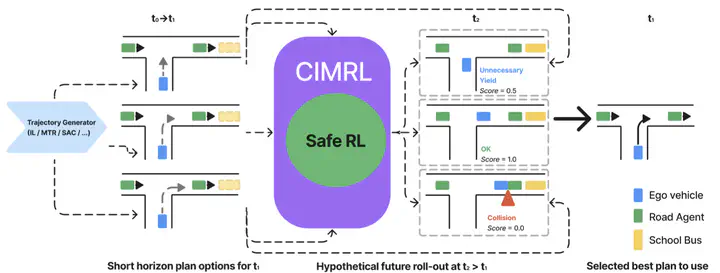
Modern approaches to autonomous driving rely heavily on learned components trained with large amounts of human driving data via imitation learning. However, these methods require large amounts of expensive data collection and even then face challenges with safely handling long-tail scenarios and compounding errors over time. At the same time, pure Reinforcement Learning (RL) methods can fail to learn performant policies in sparse, constrained, and challenging-to-define reward settings like driving. Both of these challenges make deploying purely cloned policies in safety critical applications like autonomous vehicles challenging. In this paper we propose Combining IMitation and Reinforcement Learning (CIMRL) approach - a framework that enables training driving policies in simulation through leveraging imitative motion priors and safety constraints. CIMRL does not require extensive reward specification and improves on the closed loop behavior of pure cloning methods. By combining RL and imitation, we demonstrate that our method achieves state-of-the-art results in closed loop simulation driving benchmarks.
Aleksandr Petiushko Александр Петюшко
Head of AI / Vice President, Head of RnD / Adjunct Professor / PhD
Principal R&D Researcher (20 years of experience), R&D Technical Leader (15 years of experience), and R&D Manager (10 years of experience). Running and managing industrial research and academic collaboration (45 publications, 40 patents). Hiring and transforming AI/ML teams. Inspired by theoretical computer science and how it changes the world.